7
| 本文作者: 思睿 | 2015-06-17 17:25 |

cheetah 猎豹机器人
虽然雷锋网报道过的DRC机器人挑战赛已落下帷幕,但机器人的发展脚步依然不停歇地向前推进,日前又有另一场机器人竞赛正在举行当中,那就是耐力挑战,同样由DARPA赞助。来自美国桑迪亚国家实验室和斯坦福研究所SRI的机器人走上了跑步机,展示它们能够如何超高效的完成目标。
超高效在行走机器人意味着什么?意味着人形机器人的行走效率要比Boston Dynamics 研发的 ATLAS 高20至30倍。一个全尺寸的人型机器人要达到这一效率就需要机器人能够在任何地方单次充电运行4至6小时。
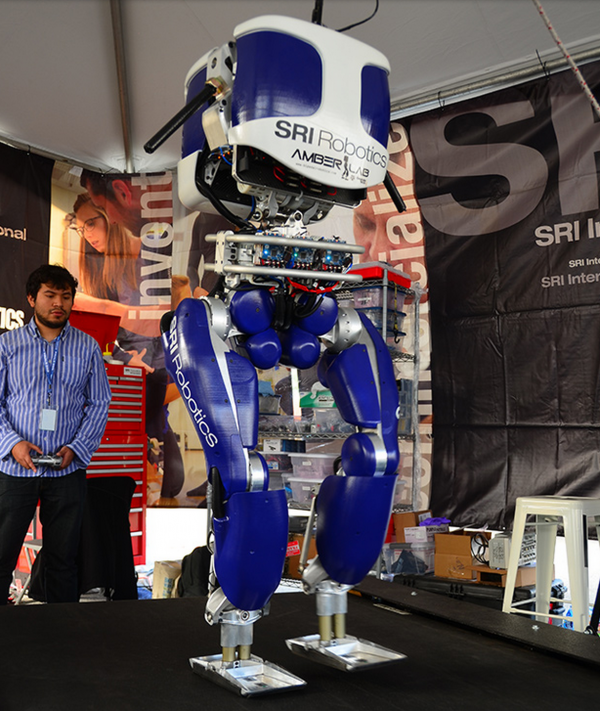
SRI 展示的这款机器名为 DURUS(寓意着耐用“Durable”),这款机器人自2013年起就在开发。
也就是在同一年,Boston Dynamics 公司推出了自己的 ATLAS 机器人,这并不是一个巧合:DARPA 看到了 ATLAS,马上意识到电源的需求使得 ATLAS 在现实世界中使用的话,是完全不切实际的,并开始资助一个项目来开发超高效机器人。他们的目标是开发一个人形架构的机器人,它与 ATLAS 机器人十分相似,不过有20倍至30倍效率的提高。
在本次比赛中,DURUS 使用了一颗充满了电的电池,并将它放在了跑步机上行走,看看在它耗尽电池之前能走多久。最终的比赛结果显示,DURUS 一共行走了2小时35分43秒,行走距离达到了2.05公里。在整个行走过程中,其功率大约为350瓦,其平均的运输成本为1.5。
运输成本是移动物体至其他地方效率高低的一个有效测量方式。ATLAS 运输成本约为20。MIT 研发的 cheetah 猎豹机器人运输成本为0.5左右。而一个人的运输成本低于0.2。SRI 估计在经过一些额外的调整后,DURUS 机器人的运输成本就有望低于1。这就意味着经过调整后,2.2kWh的锂聚合物电池可以使这个80公斤的机器人步行10公里。
最值得我们注意的是,DURUS 并没有采取一些新的能量来源技术,也没有使用超高能量密度的电池或超轻的结构。SRI 团队使用的仍然是传统机器人系统的设备:电机、机械传动装置、发动机控制器等,但在以往的基础上做出了彻底改造,但SRI 并没有透露是什么变化。
但据分析,DURUS 最大的改进在于它的行走姿态,如果你曾观看过 DRC 赛事的相关视频,你可能会注意到所有的机器人走路的样子都十分机械化。人类走路姿势更加的自然,会有意向前倾,通过向前迈步子来不断地追赶自己。DURUS 以人类相同的方式行走,由于软件的控制提供了切实可行的方案,机器人可连续行走而不翻倒。
DURUS 机器人对 DARPA 而言是一个研究平台,从根本上来说 DURUS 也仅仅是一个完整机器人的下半身,最终完整的机器人将会被命名为PROXI。
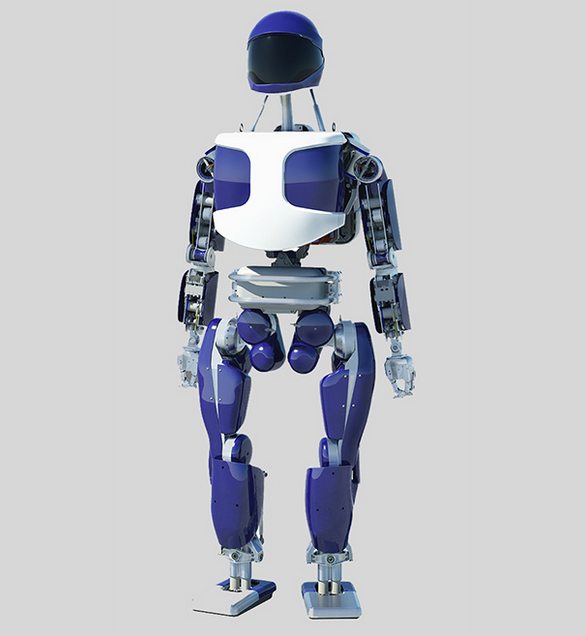
PROXI 将会融合 SRI 在机械臂等方面的经验,以及 DURUS 的高效率最终开发出一个低成本、高性能的人形机器人,可以在单次充电后运行8小时。目前,DARPA 对该项目的资助已经到期,SRI正在考虑将产品商业化生产。
via ieee
雷峰网原创文章,未经授权禁止转载。详情见转载须知。




